Robot z žuželčjim vidom
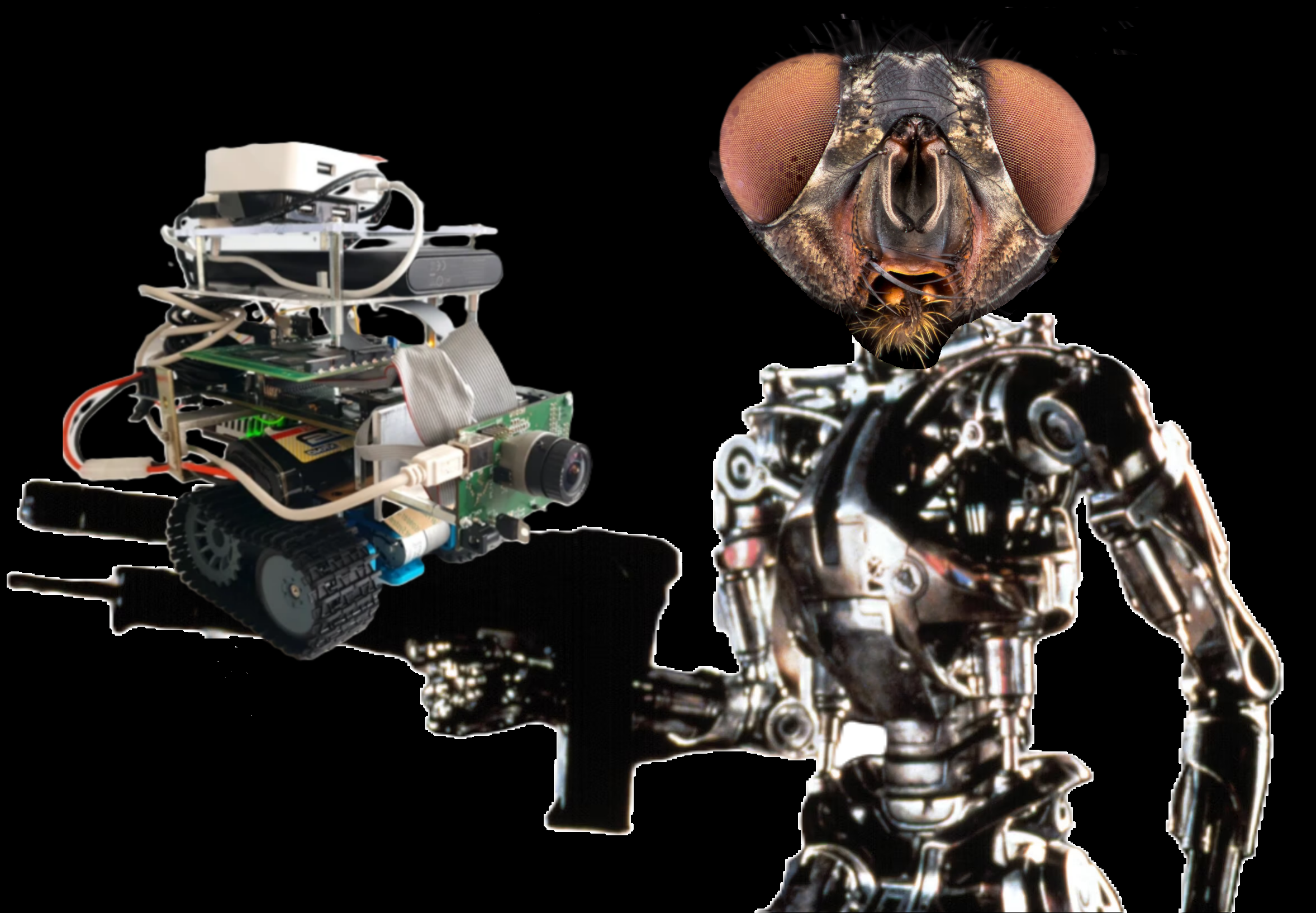
Ena ključnih sposobnosti letečih žuželk je izmikanje oviram. Pri prilagajanju hitrosti glede na bližino ovire in sprotnem iskanju vrzeli med objekti se zanašajo na zaznavanje gibanja slike. Mednarodna skupina znanstvenic in znanstvenikov se je pri izdelavi robota, ki se uspešno izmika oviram, zgledovala prav po tej lastnosti žuželk. Delovanje robota so opisali v reviji Nature Communications.
Izdelani robot se je premikal na gosenicah, okolico pa je zaznaval z nevromorfno kamero. Nevromorfna kamera ne zajema slike okolice z zaklopom, kot delujejo običajne kamere. Slike ne zajame kot celote, temveč vsak piksel na sliki deluje neodvisno. Posamezen piksel shrani referenčno raven svetlosti in jo nenehno primerja s trenutno ravnjo svetlosti. Ko se pojavijo spremembe v svetlosti, lahko rečemo, da kamera ustvari dogodek oziroma signal. Kamera tako iz vsakega piksla pošilja signale v obliki električnih pulzov do procesorja, kar si lahko predstavljamo kot potovanje akcijskega potenciala od očesa do možganov. Zaradi načina delovanja kamere procesor prejme in obdela le podatke, ki brez dvoma pomenijo oviro na robotovi poti. Robot je opremljen tudi z nevromorfnim procesorjem, ki dobljene impulze interpretira v spremembe poti premikanja robota. Nevromorfni procesor vsebuje detektorje, za obdelavo podatkov, pridobljenih v obliki pulzov, pa uporablja nevronske mreže. Tak sistem kamere, detektorjev in procesorja omogoča hitro obdelavo podatkov, hkrati pa je energetsko zelo varčen.
V študiji so poskus premikanja robota po prostoru izvedli tako, da so ga postavili v tunel, stene pa so prebarvali z različnimi vzorci, s čimer so posnemali nepreglednost v naravi. Poskus so opravili v dveh različicah – v širokem in ozkem tunelu, in za vsako različico izvedli več ponovitev. Poskus je bil uspešen, kadar je robot prišel do konca tunela, ne da bi trčil v steno. V tunelu se je robot gibal čim bolj po sredini. V različici poskusa s širokim tunelom je bil uspešen v devetih od desetih poskusov, v ožjem tunelu pa ob steno ni trčil nikoli, le enkrat se je je dotaknil.
Gibanje robota so preučili še v simulaciji. Tokrat se je virtualni robot na gosenicah v navideznem okolju premikal po podobnem hodniku, le da so na njegovo pot postavili različne ovire, okoli katerih je moral navigirati. Poskusi so v simulaciji potekali v več scenarijih. V prvem scenariju je moral robot izbrati pot skozi hodnik brez trčenja, enako kot pri poskusu s fizičnim robotom. V drugem scenariju se je moral izogibati gosto posejanim oviram, pri čemer je bila gostota ovir različna. V tretjem scenariju pa je imel robot na voljo dve vrzeli, večjo in manjšo. Izbral naj bi vrzel, skozi katero bi prišel lažje in brez trčenj. Robot se je v tunelu poskušal držati sredine, v prisotnosti ovire je upočasnil in izbral varno pot, pri izbiranju, skozi katero vrzel bo potoval, pa je izbral širšo.
V simulirani različici poskusa so znanstvenice in znanstveniki zabeležili 97-odstotno uspešnost potovanja brez trčenja. Ta uspeh pri izmikanju oviram je raziskovalna skupina pripisala uporabi z žuželkami navdihnjene regulacije hitrosti. Žuželke namreč prilagajajo hitrost, da bi se izmaknile oviram, to pa je počel tudi robot v simulacijah. Pri robotu sta sicer zaznavo in obdelavo podatkov opravila nevromorfna kamera in procesor. Za prihodnje študije si raziskovalci želijo poskuse izvajati tudi v naravnih okoljih, kar pomeni, da se bo robot moral znajti v zahtevnejših scenarijih.
Z vidom se je ukvarjal vajenec Vid.
slika: osebni arhiv








Dodaj komentar
Komentiraj